準備したものと初期設定
最近、何かと流行のRaspberry pi。Raspberry pi 3が発売されたと言う事で1つ2つ遊んでみようかと言う事で始めたのがこのページです。Raspberry pi 3を用いてLEDを光らせたり、サーボを動かしたり・・・なんてのは色んなサイトで試されているので、ここでは物理屋がラボ試験でこんな感じに応用したよと言うのを紹介できたらと考えています。私たちの分野ではちょっとした試験の為に計測機器をつなぎあわせて、測定系を作ったりします。もちろんそれを制御する為に制御用のPCを準備したりする訳ですが、実際の所は大した事はやっていません。Raspberry piの場合コンパクトなので測定系に組み込んでしまっても、それほどスペースはとらず、邪魔にはなりません。Raspberry piで測定系の制御を行い、外からsshで叩くだけで非常にコンパクトな計測系が実現できるでしょう。

最初に準備したものを紹介します。
まずは、OSの準備からです。Raspberry PiではOSはSDカードに書き込みます。準備したPCにSDカードを差し込み、(私の場合はMac)OSをダウンロードします。ここでは、Web上での実践例の多いRaspbianをインストールすることにします。本家からのダウンロードは非常に重く時間がかかるので、私はJAISTのミラーサイトを利用しました。
ダウンロードが完了したら、micro SDをPCに差し込み、場所を探します。diskutilコマンドおよびdfコマンドを用いれば下記の様に見つける事ができるでしょう。
みつけられたら、下記の様に'dd'コマンドでディスクに書き込みを行います。このとき、OSを行う前にアンマウントを行う必要があります。
あとは、OS入ったmicroSDをRaspbery pi 3に差し込んでOSの準備はばっちりです。なお、'dd'コマンドは実行中に'Ctrl+T'を押すと進捗をモニターできます。
ちなみに、
と表示された場合はアンマウントがうまくいっていません。そのときは、
で外れてくれると思います。このとき、ディスクユーティリティでFAT形式にフォーマットしフォーマット後のディレクトリがUNTITLEDになっている事を想定しています。
$ wget http://ftp.jaist.ac.jp/pub/raspberrypi/raspbian/images/raspbian-2016-03-18/2016-02-26-raspbian-jessie.zip
ダウンロードが完了したら、micro SDをPCに差し込み、場所を探します。diskutilコマンドおよびdfコマンドを用いれば下記の様に見つける事ができるでしょう。
$ diskutil list /dev/disk1 #: TYPE NAME SIZE IDENTIFIER 0: FDisk_partition_scheme *8.0 GB disk1 1: DOS_FAT_32 UNTITLED 8.0 GB disk1s1 $ df -h /dev/disk1s1 7.4Gi 2.1Mi 7.4Gi 1% 0 0 100% /Volumes/UNTITLED
$ sudo diskutil umount /dev/disk1 $ sudo dd bs=1m if=2016-03-18-raspbian-jessie.img of=/dev/disk1
ちなみに、
dd: /dev/disk2: Resource busy
sudo diskutil umount /Volumes/UNTITLED
Raspberry pi 3と会話する
次にRaspberry pi 3との会話を試みてみましょう。いくつかの方法がありますが、ここではsshを用いた方法を試してみましょう。sshを通じてRaspberry pi 3と会話をする為には、Raspberry pi 3に割り振られたIPアドレスもしくはホスト名を知る必要があります。しかし、ホスト名で接続する為に必要なavehi-daemonの設定がまだなので、ここではIPを探す方法について述べる事にします。とりあえず、Raspberry pi 3をネットワークにつながったLANケーブルと接続しましょう。同様にリモートで入るマシンをネットワークに接続し、Raspberry piとの会話を試みます。ここではarp -aを用いましょう。
すると
と言う風にネットワークにつながったIPアドレスの一覧が表示されます。今回の場合は、192.168.3.2が自分のMACと192.168.3.3が自分のiphoneでしたので192.168.3.4がraspberry piに対応します。なお、iphoneやipadを持っている方はFingと言うアプリを用いるとIPアドレスの一覧がわかります。
ここで、パスワードを聞かれると思いますので"raspberry"と入力しましょう。パスワードはこの後設定します。
上記の様な画面が表示されましたら、会話成功です。
$arp -a
? (192.168.3.2) at xx:xx:xx:xx:xx:xx on en0 ifscope [ethernet] ? (192.168.3.3) at xx:xx:xx:xx:xx:xx on en0 ifscope [ethernet] ? (192.168.3.4) at xx:xx:xx:xx:xx:xx on en0 ifscope [ethernet]
$ ssh pi@192.168.3.4
pi@raspberrypi:~$
各種環境設定
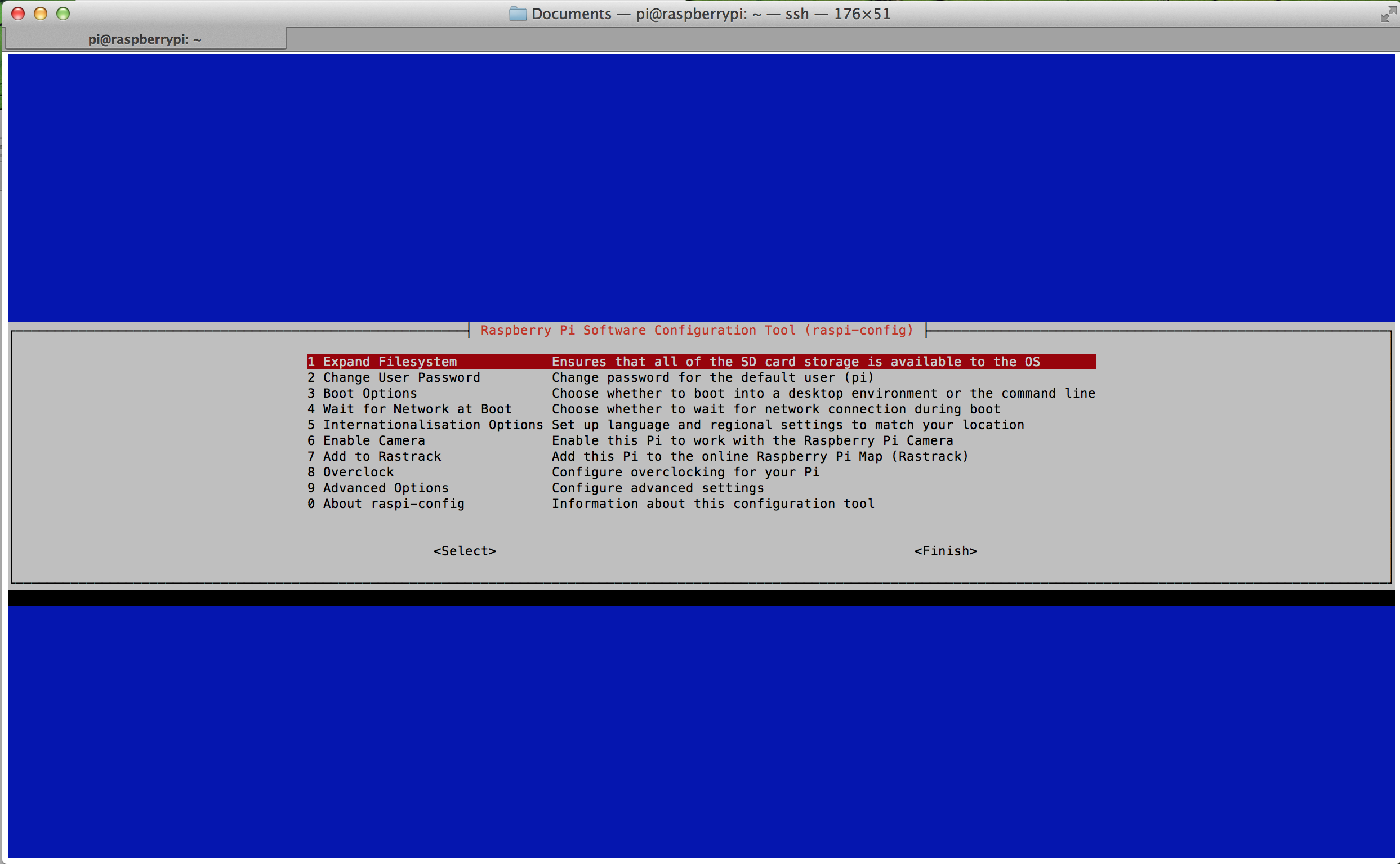
次に環境の設定です。まずは、全体の設定から。下記のコマンドを打って設定画面を開きましょう。
次に、apt-getのパッケージを最新のものに更新します。
更新ができたら、ラボ使いを想定しているので必要そうなモノを集めましょう。
まずは、エディタから。私の趣味ですが、ここではvimをインストールしましょう。使い慣れているものがある方はそちらをインストールして下さい。
つぎに、sshで接続する際にホスト名で接続ができる様に、avahi-daemonの設定を行います。設定と言っても先ほどと同じ要領で、
でインストールできます。試しに、sshの接続をexitして、ホスト名で接続してみましょう。
ここで、デフォルトのホスト名はraspberrypiですが、変更したい場合は
を打って中身を編集します。例えば、デフォルトのraspberrypiからrasp-robitaに変更してみたいときはそのまま書き換えます。同様に
を打って中身を編集します。具体的には、デフォルトのraspberrypiからrasp-robitaに変更する場合
から、
と変更します。
一度、設定を反映させる為に再起動します。
次に固定IPの設定を行いましょう。固定IPの設定は/etc/dhcpcd.confを開いて最後に次の内容を書き加えましょう。
ここで、2行目が固定したいIPアドレスとサブネットマスクになります。24の意味は255.255.255.0を2進数で表記すると、11111111.11111111.11111111.0となり24ビットと言う事を表しています。さらに、3行目はゲートウェイ、そして、最後の行がDNSになります。
次に自分のマシンからRaspberry pi 3へリモートデスクトップを通じてアクセスできる様にしましょう。ここでは、tightvncserverを用いましょう。例のごとく
を打ち込みます。これでVNC接続を利用してリモートデスクトップでアクセスが可能になります。
ここでは、macを仮定していますので、Finderを選択し、サーバーへ接続を選択します。
ここでサーバーアドレスとして
と打ち込みます。設定がうまくいっていますと、デスクトップ画面が表示されるはずです。
次にGPIOの設定を行います。GPIOの設定を行う為にはWiringPiをインストールしないといけません。これをインストールするために最初にgit-coreの設定を行います。
つぎに、git-coreのリポジトリからwritinhPiのダウンロード
これで、GPIOの設定がおわりました。設定がうまく行っていれば、
を打つと下記の様な画面が表示されます。これで終わりです。
最後にpython関連のモジュールをいくつかインストールしておきましょう。
ここでは、scipy、matplotlibをインストールしておきます。
$sudo raspi-config
すると、右の様な画面が現れるかと思います。まずは、1.Expand Filesystem。次に、2.Change User password。5.Internationalisation Optionsを開きます。I2 Change Timezone -> Tokyo。I3 Change Keyboard Layout。9. Advanced Option。A4 SSH。A7 I2C。終わったらRebootしますかと聞かれるのでYesでReboot。
$sudo apt-get update $sudo apt-get upgrade
$sudo apt-get install vim
$sudo apt-get install avahi-daemon
$ssh pi@raspberrypi.local
$sudo vim /etc/hostname
$sudo vim /etc/hosts
127.0.0.1 localhost ::1 localhost ip6-localhost ip6-loopback ff02::1 ip6-allnodes ff02::2 ip6-allrouters 127.0.1.1 raspberrypi
127.0.0.1 localhost
::1 localhost ip6-localhost ip6-loopback
ff02::1 ip6-allnodes
ff02::2 ip6-allrouters
127.0.1.1 rasp_robita$sudo reboot
interface eth0 static ip_address=192.168.3.123/24 static routers=192.168.3.1 static domain_name_servers=192.168.3.1
次に自分のマシンからRaspberry pi 3へリモートデスクトップを通じてアクセスできる様にしましょう。ここでは、tightvncserverを用いましょう。例のごとく
$sudo apt-get install tightvncserver
vnc://raspberrypi.local:5901
次にGPIOの設定を行います。GPIOの設定を行う為にはWiringPiをインストールしないといけません。これをインストールするために最初にgit-coreの設定を行います。
$sudo apt-get install git-core
$git clone git://git.drogon.net/wiringPi $cd wiringPi $git pull origin $./build
$gpio readall
+-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+ | | | 3.3v | | | 1 || 2 | | | 5v | | | | 2 | 8 | SDA.1 | ALT0 | 1 | 3 || 4 | | | 5V | | | | 3 | 9 | SCL.1 | ALT0 | 1 | 5 || 6 | | | 0v | | | | 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | ALT5 | TxD | 15 | 14 | | | | 0v | | | 9 || 10 | 1 | ALT5 | RxD | 16 | 15 | | 17 | 0 | GPIO. 0 | IN | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 | | 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | | | 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 | | | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 | | 10 | 12 | MOSI | IN | 0 | 19 || 20 | | | 0v | | | | 9 | 13 | MISO | IN | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 | | 11 | 14 | SCLK | IN | 0 | 23 || 24 | 1 | IN | CE0 | 10 | 8 | | | | 0v | | | 25 || 26 | 1 | IN | CE1 | 11 | 7 | | 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 | | 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | | | 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 | | 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | | | 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 | | 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 | | | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 | +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+
$sudo apt-get install python-scipy $sudo apt-get install python-matplotlib
